Moves by discrete steps…
- PM stepper motors
- VR stepper motors
- Hybrid stepper motors (the most commercial)
PM Stepper Motors:
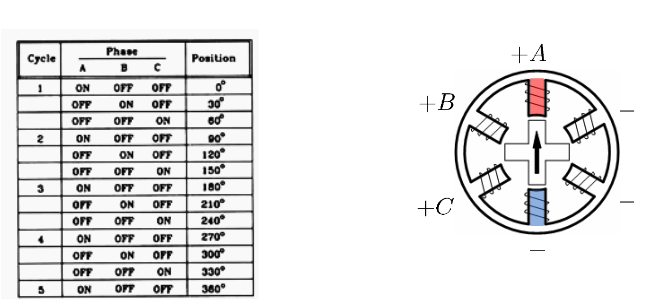
- We create a stepping motion by turning on and off each coil VR Stepper Motors:
- We can achieve rotation without a PM rotor using reluctance torque or magnetic resistence
- This uses the tendency of an iron bar to align itself with a magnetic field
- The rotor is attracted tot he nearest active pole pair Sample switching sequence…
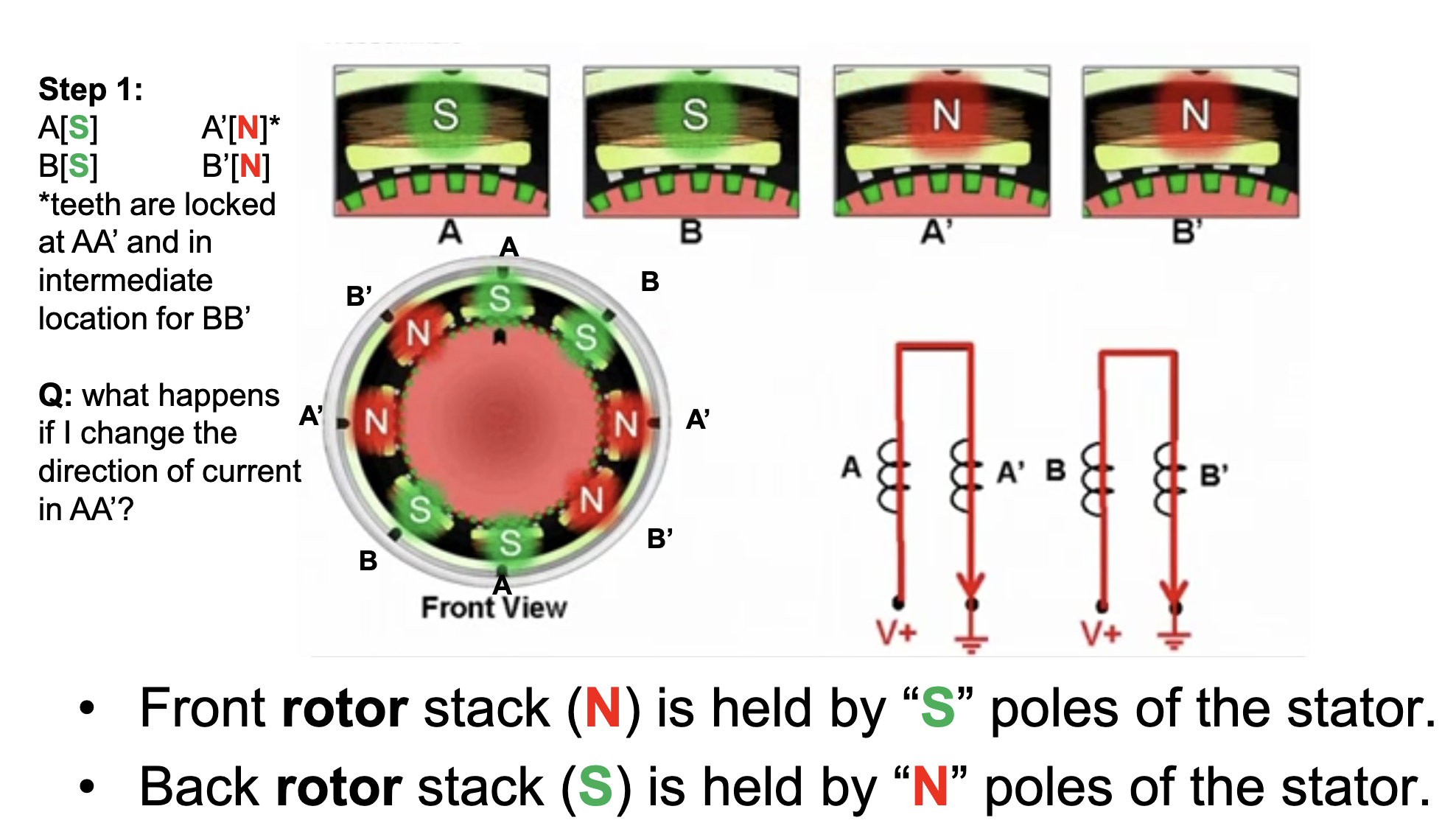
Hybrid Stepper Motors:
- A VR rotors with a PM
- Front rotor stack = north rotor cup
- Back rotor stack = south rotor cup
- To flip poles and get the motor to rotate, we flip the direction of current in the current loop (A → A’)
How it works
- We have a preset configuration for direction as well as a pulse sequence. The pulse sequence (switching the direction of current which rejects and locks in a pole to the next sequence of north or south teeth) which kind of stutters the motor in one direction of rotation where inertia makes the rotation smooth and drives rotation.
- For example, A is originally locked in, then the direction of current changes which rejects A and locks in B moving the motor in a direction and we continuously alternate the drive the motor. If we want to roatte the other way that is a different configuration of pulses that needs to happen.
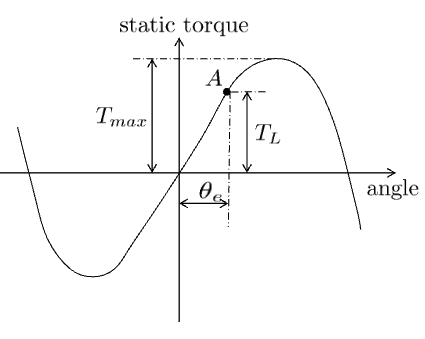
Driving
- Run on two signals, a direction signal and a step pulse
- Small transient motion at each step
- The load torque results in some position error
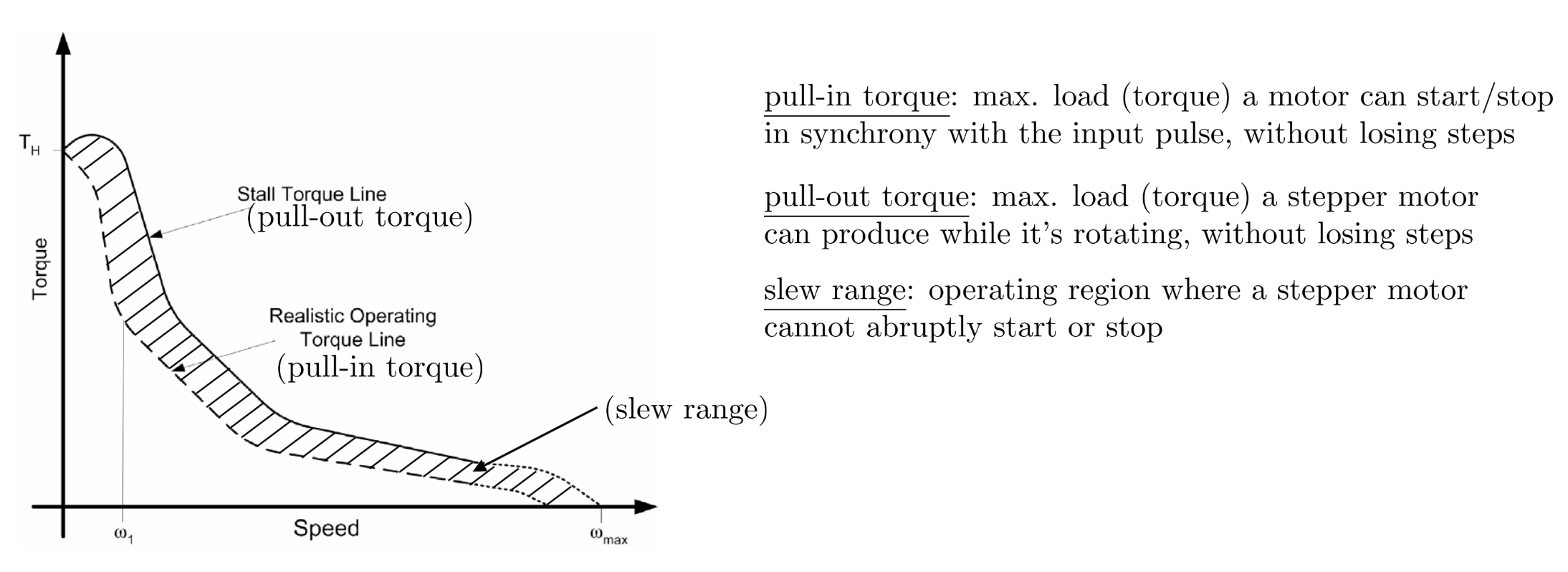
Torque Speed Curve
- Torque-speed is empirically-derived
- Totally different from servo motors (DC, BLCD)
- Torque drastically decrease as speed increases
- Typical speed ranges from 100 to 1000 rpm
- Difficult to establish distinct rated torque or speed