Performance Requirements
You must complete a sequence of 4 primary tasks:
- Drive along the path to locate the Lego figure
- Detect the figure and move it away from the danger area
- Drop off the figure at one of any of the safe drop zones
- Return the rescue vehicle to the start point and stop
Guidance and Navigation Notes
- The start point is marked with a perpendicular wide line of electrical tape
- There will be a smooth, continuous path outlined with red electrical tape.
- The path follows a concentric profile
- The path leads from the start point to the Lego figure
- There will be several safe drop zones along the path between the start point and Lego figure
- Some drop zones will intersect with the path, some may be adjacent to the path.
- The safe drop zones will be marked with green electrical tape
- The entire Lego-Figure must lay within the outer boundaries of the green tape to be considered a successful rescue
- The start point is also considered a safe drop point
- The entire Lego-Figure must lay within the starting block to be considered a successful rescue
- The Lego figure is located in the center of a bullseye target (danger area) and may be in any configuration the student’s desire
- The bullseye consists of a red circle inside of a blue circle
- The path does not go over any traps (rocks and sand boxes) or obstacles
- There are green trees as vertical markers near the safe drop zones
- The annotated blue “attempt line” indicates where an attempt will be counted if your entire device crosses that line.
The Lego Man
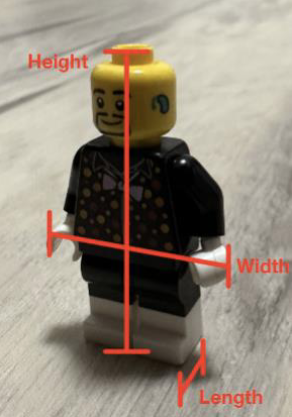
- L = 9mm
- W = 26mm
- H = 40mm
Sub System Concepts
- We want to use the Raspberry Pi as our main system (higher level logic, vision, and sensor interpretation)
- We want to use the Arduino as our IO middleware (low-level motor/servo commands, reading sensors)
Perceptions Sub Systems
We need to do the following (how many ways can we solve each problem?)
Follow the red line
- Colour / semantic segmentation from line vs everything else
- Simple thresholding
- HSV thresholding to isolate the tape
- Compute the centroid of the red region for action (steering)
- Neural network
- Train a CNN (TensorFlow Lite) to label pixels as “red” or as “background” / other objects
- Simple thresholding
- Canny edge detection
- Detect edges in camera feed and filter by orientation
- Steer to keep line centred
- Use an IR reflectance sensor to detect the line based on the reflective index
- IR sensor underneath robot?
- Use a PID loop to keep sensors aligned over tape
- Use a dedicated colour sensor
- Read colour directly from hardware that already exists Identify the bullseye
- Colour segmentation
- Simple thresholding
- Look for the following colour combination in a circular formation blue→white→red
- Neural network
- The CNN would also identify “bullseye” pixels
- Simple thresholding
- We could use shape-based detection for looking for circles
- Concert circle to greyscale and run a Hough circle transform
- Filter by size ratio to get to the center Lego Man
- Colour-based sensing
- The Lego man is mostly yellow, do a colour threshold HSV to find the lego man and filter out noise
- Build a colour histogram for the lego figure and compare each regions histogram to see if it matches the reference
- Shape-based sensing
- Use a silhouette of a lego mini figure as a template
- Perform contour matching in OpenCV for things in view to the silhouette
- Object detection
- YOLO
- Train a small YOLO model on images of lego figures in different orientations
- Run inference on the Pi and put a bounding box on the lego figure
- Pose estimation
- Use a 2D pose model for detecting the lego man
- YOLO
- Using proximity
- We know the lego man is in the bullseye, once we get to the bullseye, just detect an object using an ultrasonic sensor or something Find a safe zone
- Green zones are concentric or overlapping on the red line
- Color-based detection
- Using HSV thresholding for green, follow the red line until we find a safe zone (find the bounding rectangle)
- Semantic Segmentation
- Add another segmentation class that identifies the “safe zone” pixels
- Shape-based detection
- Find the four corners of the zone which would create a polygon representing the safe zone
- IR / colour sensor
- Detect green take using its reflective index or a dedicated colour sensor Return to the start area
- Shape / colour -based detection
- The starting area is a wider red strip, so we want to backtrack on the red line the same way we got to the bullseye / safe zone until we use edge detection to detect a wider width than normal
- Using Encoders
- We could use our encoders to backtrack if we keep everything well calibrated
Conceptual Designs
Now given different subsystems we can take different solution combinations to form a couple promising solutions
Design A
Easy solution that is reliable independent of camera conditions + good for well lit environments…
- Red line following: IR sensors
- Bullseye identification: Hough circles transform
- Lego man identification: Contour matching / Templating
- Return to start: Follow IR line back to start and detect wide segment of red tape
Design B
Uses more advance and rigorous methods for shape and feature detection, uses a single sensor
- Red line following: Camera colour thresholding
- Bullseye identification: Hough circle transform
- Lego man identification: Proximity
- Return to start: Follow red line back to start and detect wide segment of red tape
Design C
Single consistent approach which would be very robust if well trained, also minimizes separation logic
- Red line following: Semantic segmentation
- Bullseye identification: Semantic segmentation
- Lego man identification: Semantic segmentation
- Return to start: Semantic segmentation
Design D
For things with high contrast this works well, simple detection implementation
- Red line following: Canny edge detection
- Bullseye identification: Color Thresholding
- Lego man identification: Proximity Detection (mechanical) + colour thresholding
- Return to start: Canny edge detection for find the wide start tape
Combination
We could also take a combination approach instead of just choosing one solution to each sub-system…
- Red line following: Canny edge detection for lane detection + colour confirmation
- Bullseye identification: Hough circle transform + contour analysis where we can get position by checking the perceived size vs the real diameter of the circle
- Safe zone detection: Canny edge detection for 4 sided polygons + colour detection for confirmation
- Lego man identification: Colour thresholding (bright yellow thing), we can experiment with feature matching and templating with CV
- Return to start: Basically follow the red line back and find the wide piece of tape that is the start line that is also red
Controls Sub Systems
- PWM?
- PID?
Maybe let Jackie cook the design since I’m less familiar with controls