For a general feedback control system…
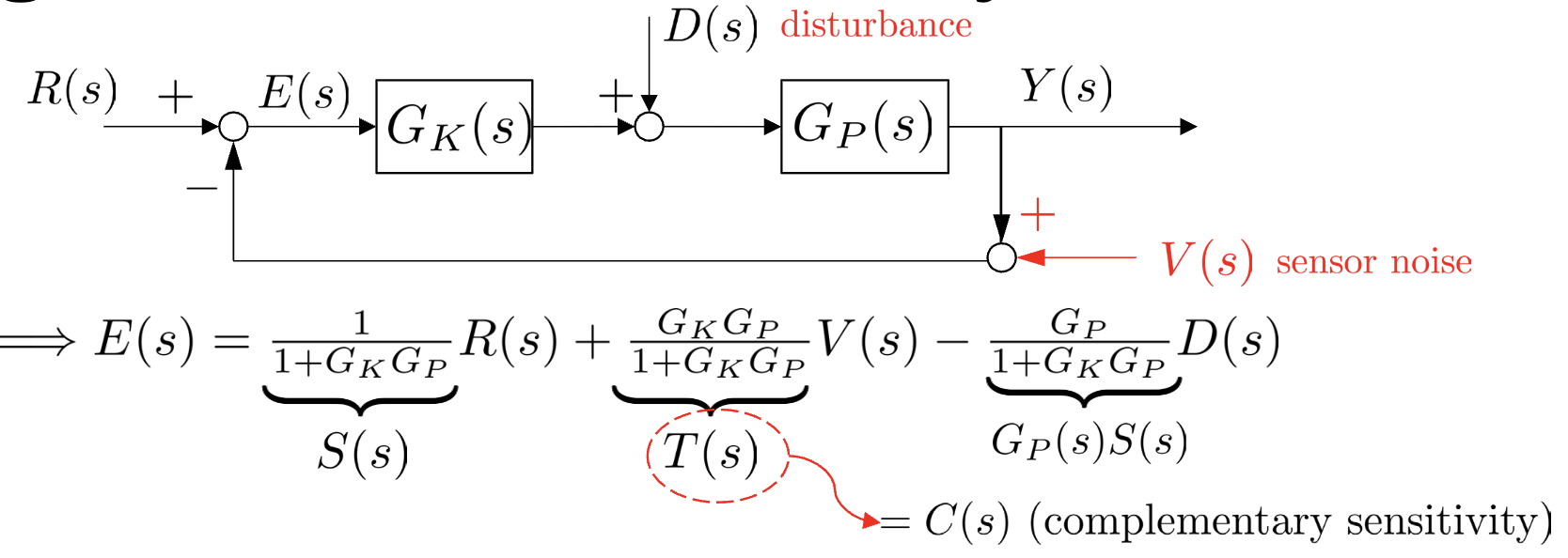
There are fundamental tradeoffs due to
We need…
- For tracking, parameter uncertainty, disturbance rejection… S(s) to be small → is large
- For noise rejection, parameter uncertainty… T(s) to be small → is small
The main idea of loop sharing is to design the controller such that these FR (frequency responses) can be shaped to a desired form.
Fortunately… - Reference (), disturbance (), and some parameter uncertainties usually have low frequency contents
- Noise () and other parameter uncertainties have high frequency contents Therefore, we can make large for low frequencies and small for high frequencies!
Stability Margins
For stability we need to avoid for any Re(s) > 0…
In other words, we don’t want or for …
This is why we need and !
The main idea is…
We can design to shape the loop function as desired over all frequencies, bode plots and their additivity are key tools here…
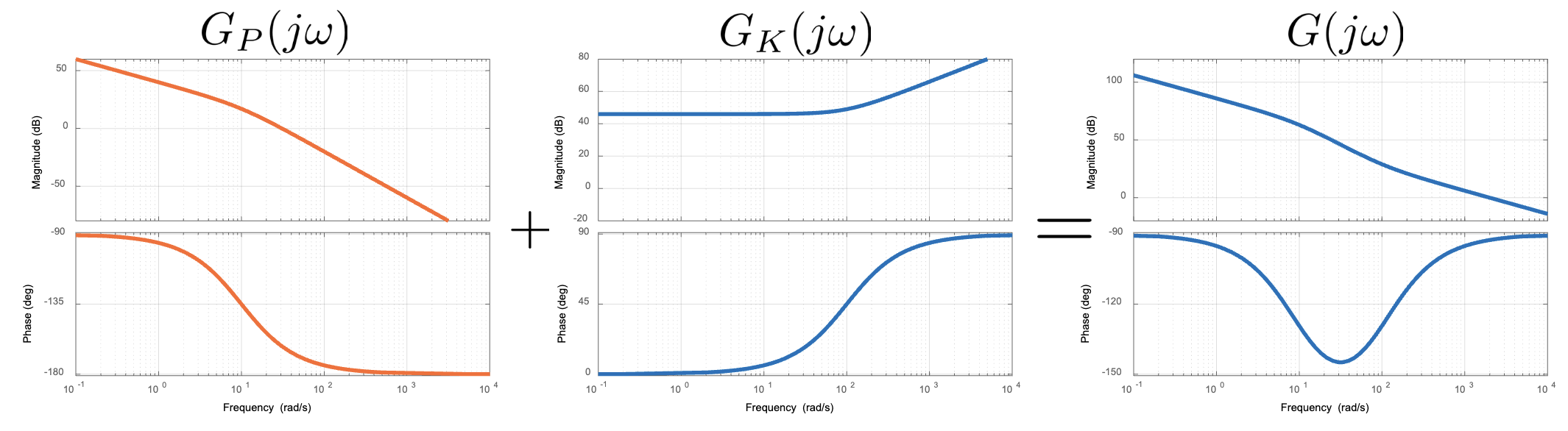
We can basically just use superposition here to get our desired shape!
What are good shapes?
- Positive phase in can increase PM of
- e.g. PD control
- Or stabilize it if PM of
- Squashing high frequencies reduces effect of noise.
- Infinite gain at reduces the steady-state errors, e.g. PI control
- Large closed-loop bandwidth is equivalent to large cross-over frequency (for faster response speed).
- Achieving these in frequency domain (i.e., Bode shapes) can often be a bit tricky (tuning is a bit of an art).
Lead and Lag Compensation
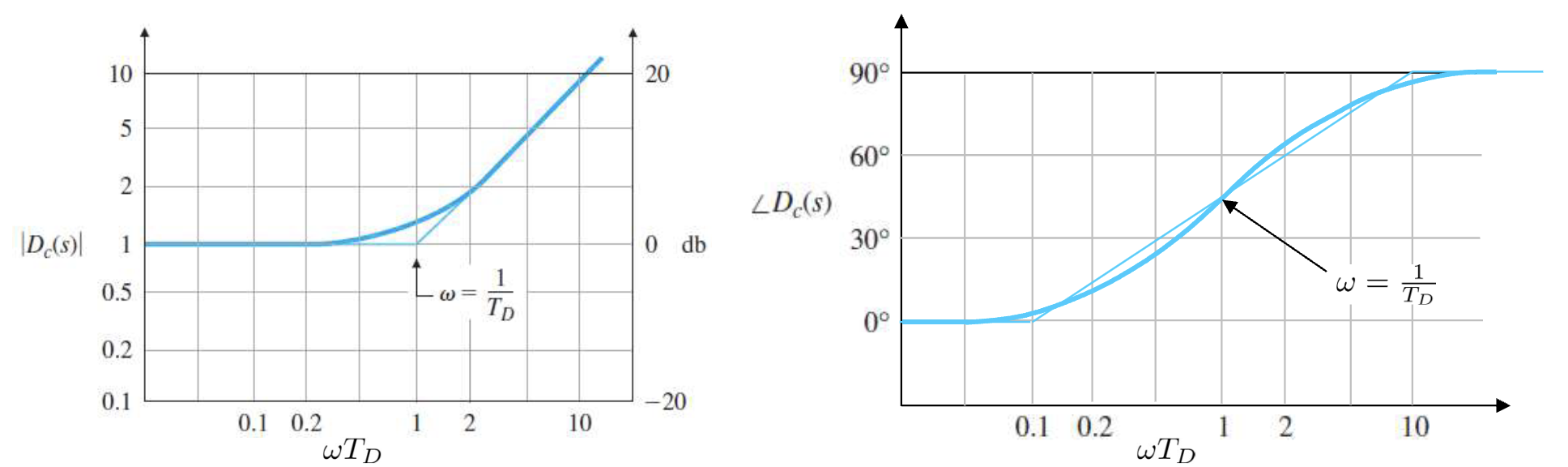
PD Compensation: with
- We have a stabilizing effect if we have a positive slope (+1), and positive phase at
- We have increased magnitudes at high frequencies → may amplify high frequency noises…
- This is not desirable since we want to suppress our magnitudes at high frequencies, this is the trade-off…
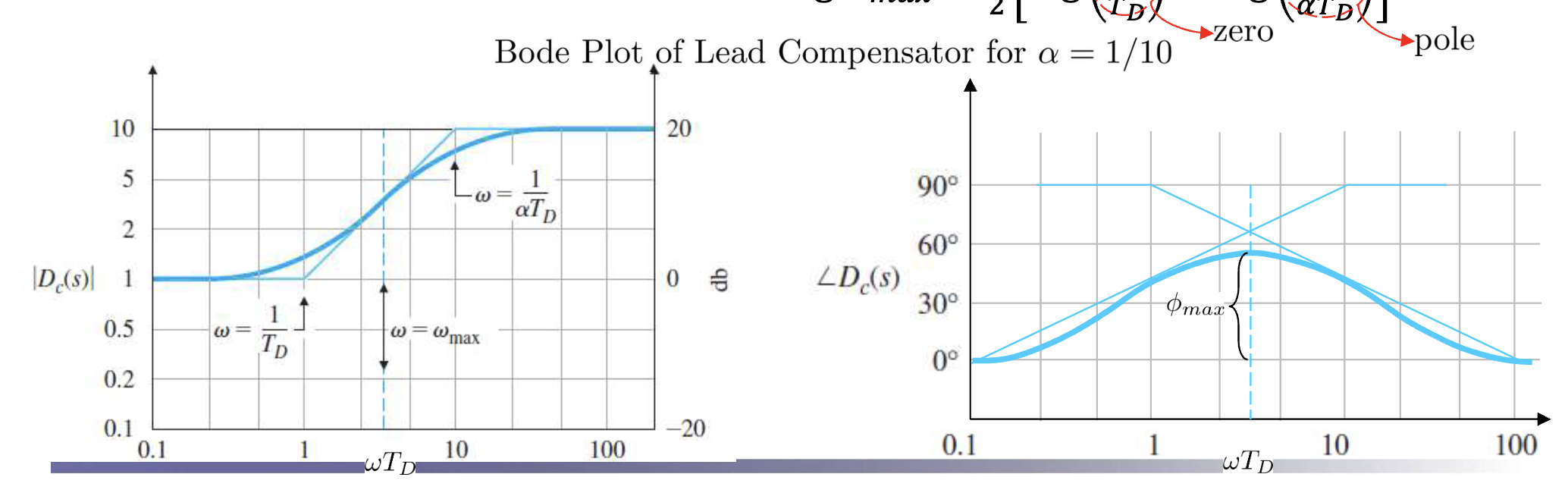
Instead of using PD compensation, we use lead compensation which is a generalized version of PD compensation…
- To alleviate that high frequency amplification, we add a pole at
- This is what lead compensation is… where
- Some key points of phase and magnitude include
- with and
- Another property is where the first log term is the zero, and the inside of the second log term is the corresponding zero
General Guidelines for Lead Compensation
- Choose to be a bit bigger than needed for PM (phase-margin)
- can be chosen based on by how much PM we need to increase using
- Choose (zero-location) appropriately so that the occurs at the crossover frequency noting the value of General Procedure
- Determine
- To meet requirement
- To meet requirement (pick to make )
- Check PM for chosen K and allow for a buffer of 10°-20° to determine the required lead phase
- Determine based on using ( - plot)
- Pick to be at the cross-over frequency by
- Draw Bode plot to check
- Iterate as needed
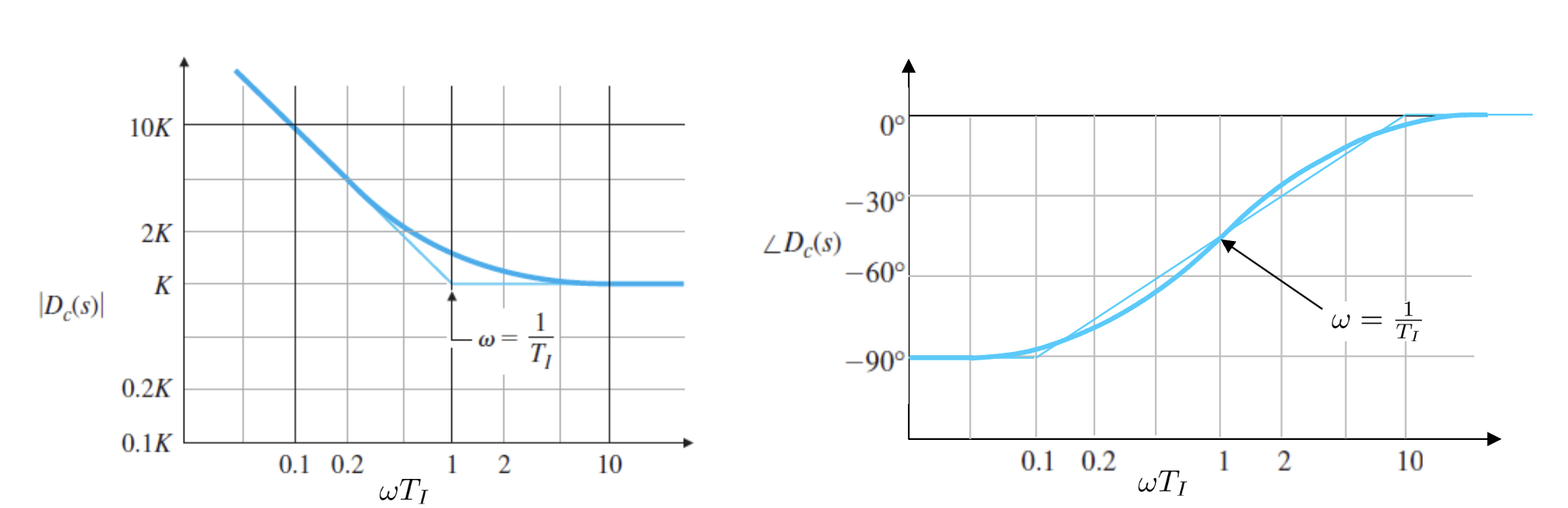
PI Compensation
with
- Tracking effect: infinite gain at
- Decreased phase at frequencies lower than may degrade stability by decreasing for
Lag Compensation
To alleviate low frequency phase decreases, add a pole at
- This is called lag compensation where
- Key properties of the magnitude and phase…
- Increase in amplitude at low frequencies
- Increase in phase at low frequencies General Procedure
- Determine to meet required PM w/o compensation
- Draw Bode plot to evaluate low-frequency gain
- Determine for the low-freq. gain requirement (e.g. ) where is based on the chosen value of and what should be ()
- Choose the corner frequency = (the zero) to be 1/2 ~1/10 below the new
- The other corner frequency is then
- Iterate as needed
Some guidelines
Lead compensator for PD, Lag compensator is for PI
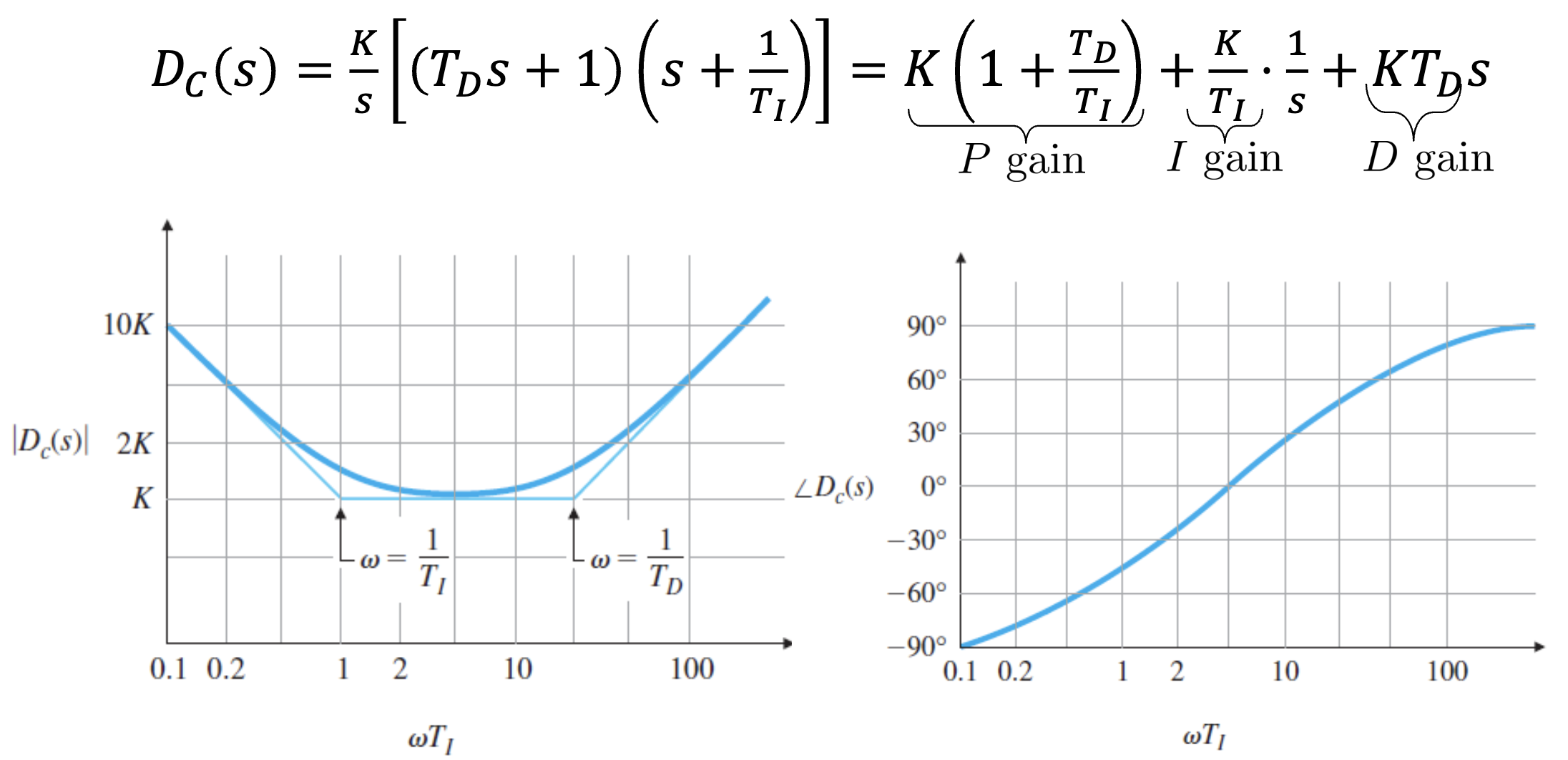
We can use PID compensation to achieve PM improvement at and low frequency gain improvements
Notch Compensation
- Instead of damping control like PD, we can specifically target the resonance frequency to cancel it out
- This only works if the oscillation frequency is well known and does not change with time
- Typically of the form
- The lightly damped poles can never be fully canceled
- Nevertheless, it can suppress them in a targeted way
- Loop TF: