The goal
The goal is to make a follow exactly

Here, we want which means we want to make our error signal 0 irregardless of the input which is the steady state error.
We can get the error transfer function by deriving the transfer function of the error signal vs the input using the feedback loop (use the equations from Block Diagrams (feedback connection))
The conditions we need to satisfy…
- We need to categorize open-loop TFs for tracking (this is the gain inside the closed loop)…
- In this case…
- For then
- Where we need to make the limit = 0 which means we need an s in the denominator which means one pole at the origin where n=1…
- This is called a type 1 system
- Where the limit is the DC gain of the open loop system
- For = then
- Here, since we need to make the limit = 0, we make our denominator of the same from as the unit step input except now, n=2… now
- This is a type 2 system
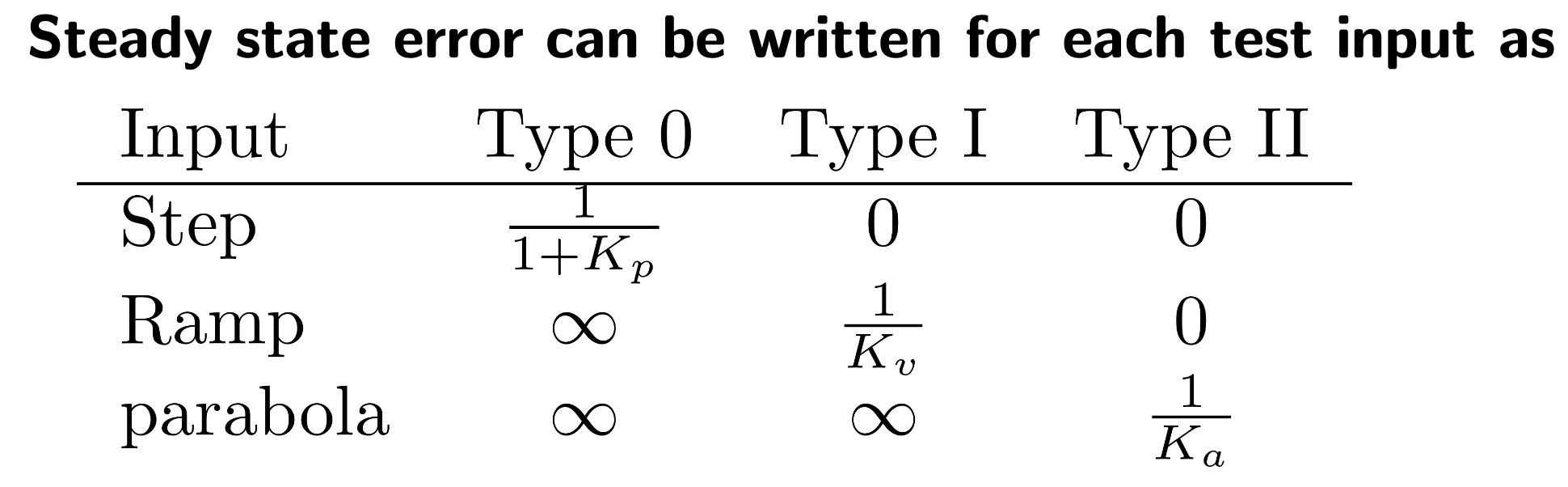
Steady State Error Constants
- : Position
- : Velocity
- : Acceleration
Solving Examples
Identify the type of system used, which indicates which types of systems need a correction factor. Then you get the correction factor by taking then applying where x is the type of correction factor we need
Disturbance Rejection
- This is very similar to tracking
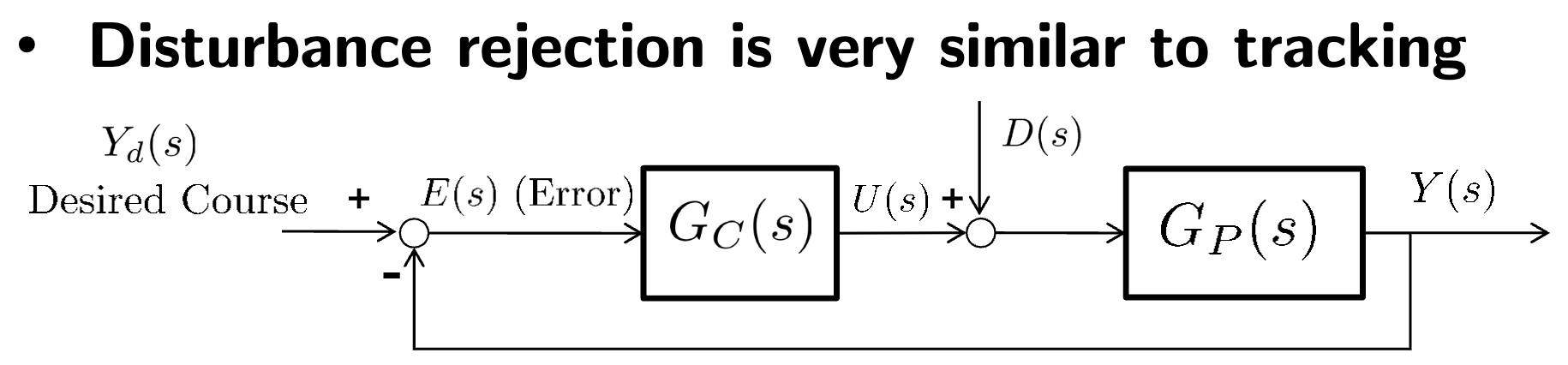
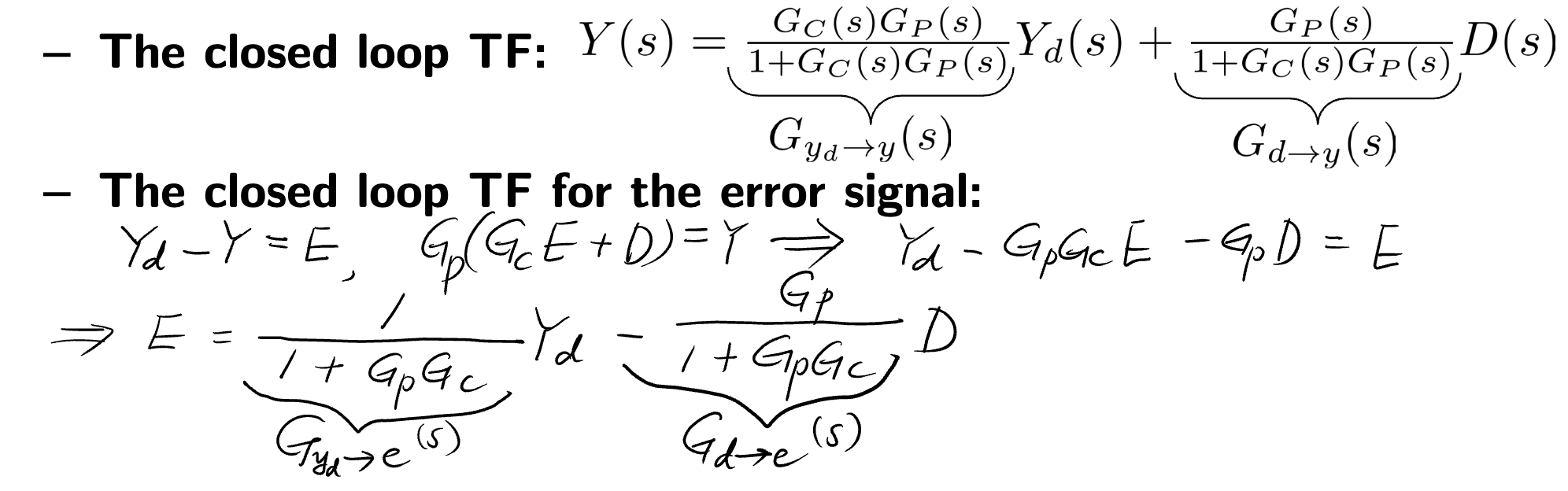
- Here, you have the closed loop TF for the output with the input and the disturbance
- You also have the closed loop TF for the error signal with the inoput and the disturance
- This is 4 TFs total