Response of Second Order Systems
For a similar mass damper system to what was presented in 1st Order Dynamic Systems…
Nomenclature
Sometimes dampers are b, sometimes they are c…
Starting with out 2nd order ODE…
- Taking a LaPlace transform
- Factoring out X(s) and F(s) we can derive the following to get to the transfer function
-
*You can use the auxiliary method from State Variable Models if you have a time differentiated input
Standard Form
Step response:
- Where the denominator can be factored as…
There are different cases here which are the Free Damped Responses.
- Final value (DC gain): k
- Peak time
- Settling time (5%)
- OR
- (2% settling time which is for 1st Order Dynamic Systems!!!! need to relocate this) Rise time:
- Side note: and and
Finding poles on a graph
Find which is the unit circle distance, then find which is the angle (direction) of the poles, then find which is the vertical distance away from the imaginary axis to which the poles lie.
For an undamped 2nd order response
When c=0…
Where the terms above are out zero state response and zero input response
Zero Input Response
Transfer Function
Where the “characteristic equation” models our poles.
Using the characteristic equation, we can derive the natural frequency of the system as…
Using this inverse LaPlace transform from LaPlace Transforms…
Therefore, applying this concept…
- Where this oscillates with the frequency of the poles
Also note the general solution for a 2nd order homogenous equation with
Using given boundary conditions, we can find and by seeing which values satisfy the B.Cs
% Overshoot
This is the amount that the waveform overshoots the steady-state value…
- We also use these identities
Damped Response
The Characteristic equation is defined as
Damped Response Important Variables
Where we have these relationships…
- or
- which means and
- are the poles
- Note that as well where or the imaginary part of the poles
The Free Damped Response
Where the poles are given above.
Case 1
If , then and which is the over-damped case.
and our discriminate is positive meaning we have two distinct real poles.
This yields…
Where
and meaning that is the dominant pole.
Solving
After coupling the system, solve for the s’s and the time constant above, then…
Case 2
then , this represents the critically damped case. This is the minimum damping to have no oscillation.
in this case and yields repeated real poles.
in this case,
Using the derivation from the lectures…
Note
No or since there is no oscillation
Case 3
represents the underdamped case. This should yield imaginary roots.
where is the natural frequency and the square root term.
From the line above
where
Where with maybe some error
Solving
Useful equations for this case…
Effects of Pole Locations
For qualitative understandings, will not be examinable though…
- As you move further away from the imaginary axis, overshoot decreases and our damping increases
- Increasing increases frequency but keeps the same overshoot
- As decreases, increases which increases frequency but yields a similar envelope as we make these changes Adding poles:
- Poles dominate if they are close to zero (often converts a 2nd order system to a 1st order system)
- If close to real parts of other poles, the response slows down
Effects of Zeroes
Also for qualitative effects
Adding zeroes:
- Adding zeroes in the numerator increases the overshoot the closer the zero is to the real axis
- If its far away from the axis, basically nothing happens
- If we have a zero in the same location as a pole, they effectively cancel each other out
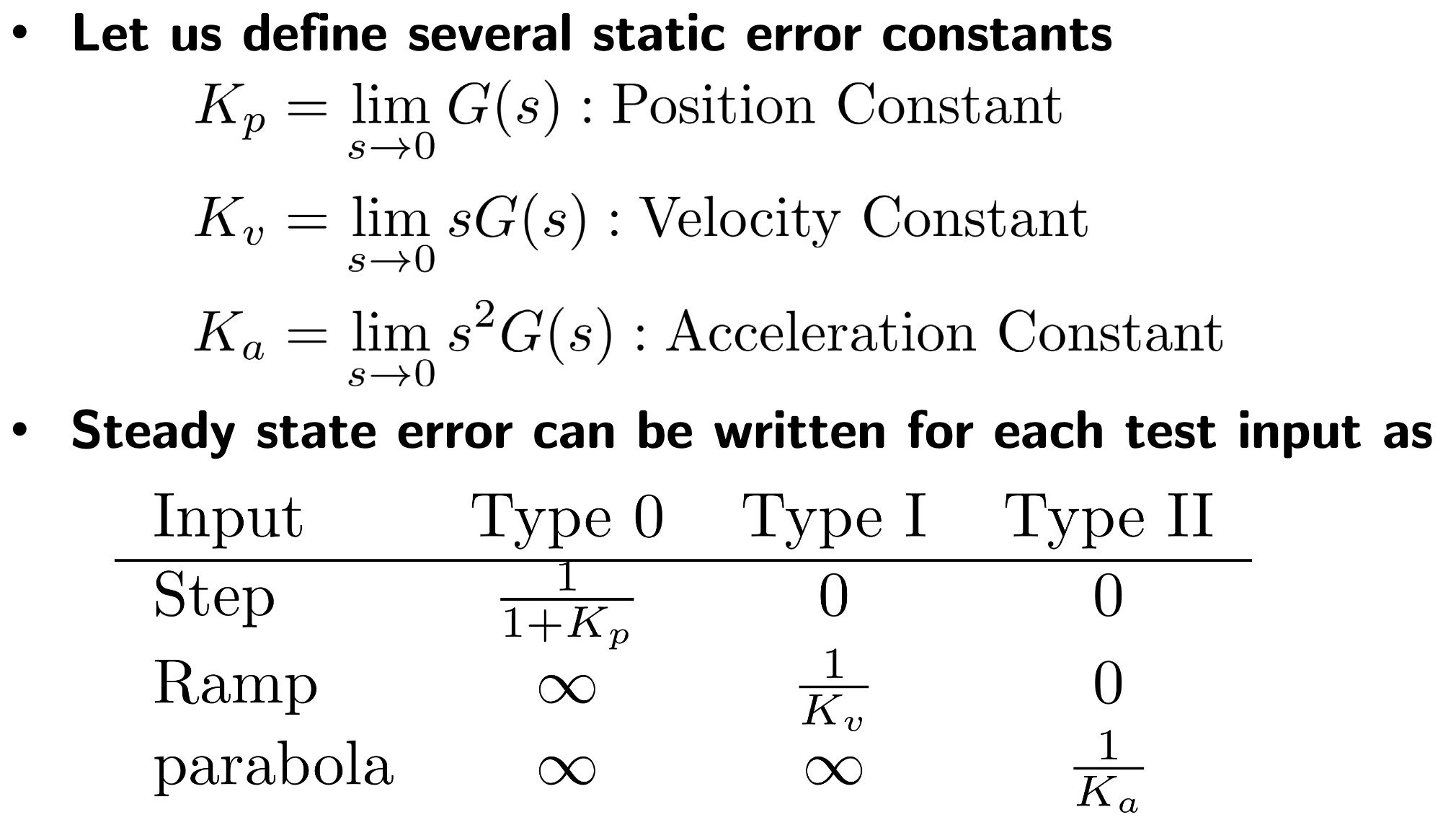
System Types
The type of a system is the number of poles it has at the origin…
- Type 0 → No poles
- Type 1 → 1 pole
- Type 2→ 2 poles
Increasing System Type
The simplest way to increase the system type is to add an s to the denominator of the open-loop TF. or to add a block to the block diagram